
The following article explains how imaginary numbers can be represented by matrices.
• Why Is the Square of the Imaginary Unit i Equal to -1? [2014/6/29]When I first encountered imaginary numbers, I was completely confused.
$$ i^2 = -1 $$No real number has a square equal to -1, so the idea of introducing such a number felt deeply unsettling. I suspected that bringing in such a strange object would eventually lead to a contradiction. Yet no matter how far I carried the calculations, no inconsistency appeared. On the contrary, the theory fit together beautifully, as if a missing piece of the puzzle had finally been found. That led me to a different question.
“If this number is not supposed to exist, why does it work so well?”
While I was still wrestling with that question, I came across a mathematical problem that defined the following matrix:
$$ I = \left(\begin{array}{cc} 0 & -1 \\ 1 & 0 \\ \end{array}\right) $$This matrix I is a matrix representation of the imaginary unit, and it follows the same algebraic rule as i. For example,
$$ I^2 = -E $$I came to interpret this discovery in the following way:
“The symbol i is simply a shorthand notation for the matrix I.”
Suppose you meet the quadratic equation
$$ x^2 - 2x + 2 = 0 $$and reinterpret it as a matrix equation
$$ X^2 - 2X + 2E = 0 . $$The solutions then appear naturally as
$$ X = E \pm I , $$which corresponds to the familiar expression
$$ x = 1 \pm i . $$Seen in this way, my doubts disappeared. I finally felt that I understood what imaginary numbers were doing.
In my view, complex numbers become easier to understand when they are introduced through matrices rather than through quadratic equations. From the quadratic-equation point of view, an imaginary number can seem like a “nonexistent” object. From the matrix point of view, however, obtaining the negative identity matrix after squaring is perfectly natural.
To make this idea more accessible, I wrote a companion article that starts from matrices. In that article, I call the matrix I the imaginary-unit matrix, or more suggestively, the rotation-unit matrix.
My goal is to help fewer people struggle with imaginary numbers in the way I once did. Because the article assumes some familiarity with matrices, it is intended for readers who have already studied them.
When I first learned about matrices, the rules for manipulating them seemed strange. I practiced them mechanically until I discovered that matrices describe linear transformations. Once a matrix is understood as “shorthand for a linear transformation,” those rules begin to feel perfectly natural.
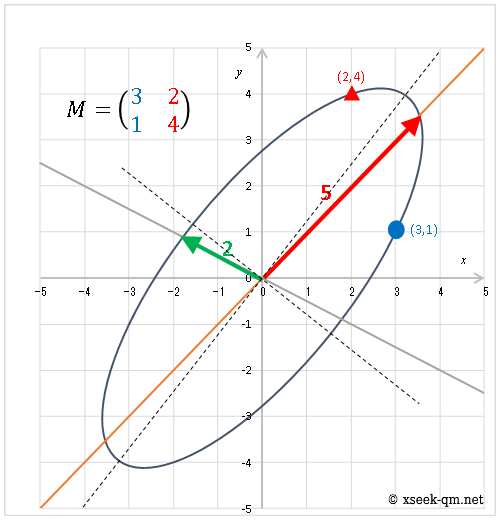
Since a matrix itself is not something we can draw directly, it can be difficult to build geometric intuition. To make matrices easier to visualize, I looked at how various matrices transform the unit circle:
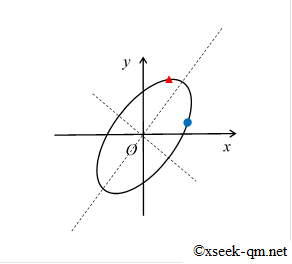
The blue dot shows where the point (1, 0) is mapped, and the red triangle shows the image of (0, 1). At first glance, the principal axes of the ellipse may look like eigenvectors, but in general they are not:
The article concludes with the singular value decomposition (SVD), which gives an even clearer picture of what matrices do. SVD decomposes any matrix into a right rotation, horizontal scaling, vertical scaling, and a left rotation:
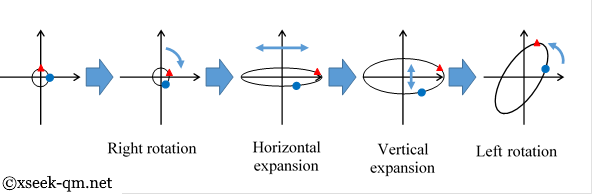
By viewing each matrix through the ellipse it creates, we can make these otherwise invisible objects visible.
One way to deny the existence of a number is to use proof by contradiction:
“If assuming a number exists leads to a contradiction, that number does not exist.”
The contrapositive is
“If a number exists, assuming its existence will not cause a contradiction.”
Since assuming imaginary numbers leads to no contradiction, it is tempting to say that they exist. However, that inference runs from the conclusion back to the premise, so it is not logically valid. The absence of a contradiction does not, by itself, prove existence.
Intuitively, the idea that a square could equal -1 feels impossible, and the discomfort remains. Why does it feel so contrary to our intuition?
One way to ease that discomfort is to regard an imaginary number as shorthand for a rotation-unit matrix:
Rotation matrices are ordinary mathematical tools; we do not doubt that rotations exist. If an imaginary number is simply a symbol for such a rotation, its existence becomes much easier to accept.
The word imaginary suggests something unreal, but as we have seen, imaginary numbers can correspond to concrete rotational transformations. To avoid the misconception that they “do not really exist,” I would like to propose a new name.
Perhaps calling them numbers at all is part of the confusion. In everyday language, a number usually means a count of objects—that is, a natural number. Mathematics has repeatedly expanded the meaning of the word, but each expansion makes the original meaning less intuitive.
Integers can represent positions, real numbers can represent lengths, and so on, but imaginary numbers play a different role. Rather than thinking of them only as numbers, we can think of them as units of rotational transformation. I therefore propose the term rotation-transformation unit, or simply rotation unit.
Textbooks typically say:
“Call any number whose square is -1 the imaginary unit.”
Many people naturally respond, “But such a number does not exist!” So why not teach the idea this way instead?
“Call any transformation that rotates an image by 180 degrees after two applications a rotation unit.”
No one doubts that such transformations exist. In fact, there are two of them: +i and -i. Encouraging students to notice that distinction can deepen their understanding.
I believe in the power of good names. Even if a term is not perfectly formal, a clear name can help more people feel at home with mathematics.
© 2014, 2015 xseek-qm.net
広告


